# 1.视点和视线
三维物体跟二维物体的显著区别就是,三维物体具有深度,也就是 z 轴。我们最终把三维场景绘制到屏幕上,并以一个观察者的身份去看待三维场景。为了定义一个观察者。我们需要考虑以下两点:
- 观察方向,也就是观察者自己在什么位置,在看场景的那一部分。
- 可视距离,也就是观察者能看多远。
三维世界中,我们将观察者的位置称之为视点,从视点出发沿着观察方向的射线我们称之为视线。在 WebGL系统中,默认情况下,视点位于原点(0,0,0),视线为z轴负半轴,指向屏幕内部的方向(右手坐标系)。
# 2.视点、观察目标和上方向
- 视点:观察者所在的三维空间位置,视线的起点,一般用
Pe(ex,ey,ez)来表示。 - 观察目标点:被观察的目标所在的点,视线从视点出发,穿过目标点并继续延伸。只有同时知道观察目标点和视点,才能算出视线方向。观察目标点的坐标一般用
T(tx,ty,tz)表示。 - 上方向:最终绘制在屏幕上的影像中的向上的方向,也称为相机上方方向。因为观察者还是可以以视线为旋转轴的,如果旋转旋转轴,观察者看到的场景也会偏移。上方向一般用
upDirection(ux,uy,uz)表示。
在WebGL中,我们可以用上面三个矢量创建一个视图矩阵
视图矩阵的目的是改变观察者看到的三维场景。本质上其实还是将三维场景里面的模型进行的移动操作。
实际上,根据自定义的观察者状态,绘制观察者看到的景象与使用默认的观察状态,对三维对象进行平移、旋转等变换,再绘制观察者看到的景象这两种行为是等价的。
# 3.视图矩阵的推导
在 WebGL 中,视图矩阵(View Matrix)用于将世界坐标系转换到相机坐标系,从而模拟相机视角。
下面我们将推导一下视图矩阵的计算过程。
根据相机坐标系原点(视点)在世界坐标系中的位置为 Pe(ex,ey,ez),目标位置T(tx,ty.tz)以及上方向upDirection(ux,uy,uz),我们可以求解相机坐标系的基向量在世界坐标系中的表示
# 1. 计算Z轴方向向量
从 相机位置(Pe) 看向 目标位置(T) 的方向称为观察方向,观察方向可以看做相机坐标系的 Z 轴方向,那么世界坐标系的 Z轴方向向量可以这样求出:
zAxis = Pe - T = (ex-tx,ey-ty,ez-tz)
将其归一化得到Z轴基向量(zx, zy, zz)。
(zx, zy, zz) = 1/|Pe-T| * (ex - tx, ey - ty, ez - tz)
# 2.计算X轴方向向量
有了 Z 轴方向向量 zAxis和临时 Y 轴 方向 upDirection,我们就可以利用向量叉乘来计算 X 轴方向了。
xAxis = zAxis x upDirection
将其归一化得到X轴基向量(xx, xy, xz)。
(xx, xy, xz) = (zAxis x upDirection) / |zAxis x upDirection|
计算出 X 轴方向之后,我们需要将 xAxis 和 zAxis 归一化,得到它们的基向量。
因为 upDirection 是我们一开始假想的,只是为了求解 X 轴方向,upDirection 和 zAxis 不一定是垂直关系。所以我们需要再求一遍 Y 轴的方向向量。仍然利用向量叉乘求解 Y 轴方向向量:
# 3.计算 Y轴方向向量
yAxis= zAxis × xAxis
将其归一化得到X轴基向量(Yx, Yy, Yz)。
(xx, xy, xz) = (zAxis x upDirection) / |zAxis x upDirection|
# 4. 构建旋转矩阵
将求得的X,Y,Z轴的方向都归一化后,根据归一化的X,Y,Z轴基向量xAxis(xx, xy, xz)、yAxis(yx, yy, yz)、zAxis(zx, zy, zz)
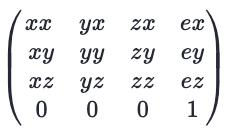
通过对相机矩阵,求逆矩阵就可以得到我们的视图矩阵。
# 4.视图矩阵的算法实现
下面是视图矩阵算法实现。
# 1.求出Z 轴基向量,即观察方向:
function lookAt(cameraPosition, target, upDirection){
const zAxis = (Vector3.subtractVectors(cameraPosition, target)).normalize();
}
2
3
# 2.根据 zAxis 和 upDireciton 求出 X 轴基向量:
const xAxis = (Vector3.cross(upDirection, zAxis)).normalize();
# 3.根据 zAxis 和 xAxis ,重新计算Y轴基向量 yAxis:
const yAxis = (Vector3.cross(zAxis, xAxis)).normalize();
# 4.构建旋转矩阵
function createRotateMatrx(cameraPosition, target, up) {
const zAxis = normalize(
subtractVectors(cameraPosition, target));
const xAxis = normalize(cross(up, zAxis));
const yAxis = normalize(cross(zAxis, xAxis));
return new Float32Array([
//第一列 x轴基向量 第二列 y轴基向量 /第三列 z轴基向量
xAxis[0], yAxis[0], zAxis[0],
xAxis[1], yAxis[1], zAxis[1],
xAxis[2], yAxis[2], zAxis[2]
]);
2
3
4
5
6
7
8
9
10
11
12
# 5.构建平移矩阵
为了将世界坐标系中的点平移到相机的视图坐标系,我们需要一个平移矩阵。
在世界坐标系中,相机位置的点为 cameraPosition(x,y,z),那么在相机坐标系中,相机的位置为 (0,0,0),世界坐标系中的原点位置则为-cameraPosition(x,y,z)。所以就有了的下面的平移矩阵。
function createTranslateMatrix(cameraPosition) {
return new Float32Array([
//第一列 x轴基向量 第二列 y轴基向量 /第三列 z轴基向量
1,0,0, -cameraPosition[0],
0,1,0, -cameraPosition[1],
0,0,1, -cameraPosition[2],
0,0,0,1
]);
}
2
3
4
5
6
7
8
9
# 6.视图矩阵的实现
也就是相机坐标系的坐标通过右乘该矩阵可以到其在世界坐标系下的坐标。
function createViewMatrix(cameraPosition, target, up) {
// const rotateMatrx = createRotateMatrx(cameraPosition, target, up);
// const translateMatrix = createTranslateMatrix(cameraPosition);
// const viewMatrix = multiplyMatrices(rotateMatrx,translateMatrix);
// return viewMatrix;
// 上面通过矩阵运算得到的结果跟下面的结果是一样的
const zAxis = normalize(
subtractVectors(cameraPosition, target));
const xAxis = normalize(cross(up, zAxis));
const yAxis = normalize(cross(zAxis, xAxis));
return [
xAxis[0], yAxis[0], zAxis[0], 0,
xAxis[1], yAxis[1], zAxis[1], 0,
xAxis[2], yAxis[2], zAxis[2], 0,
-dot(xAxis, cameraPosition), -dot(yAxis, cameraPosition), -dot(zAxis, cameraPosition), 1
];
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
# 5.推导过程中用到的基本方法
下面是推导过程中用到的一些基本方法
归一化
function normalize(v) {
const length = Math.sqrt(v[0] * v[0] + v[1] * v[1] + v[2] * v[2]);
// 确定不会除以 0
if (length > 0.00001) {
return [v[0] / length, v[1] / length, v[2] / length];
} else {
return [0, 0, 0];
}
}
2
3
4
5
6
7
8
9
向量相减
function subtractVectors(a, b) {
return [a[0] - b[0], a[1] - b[1], a[2] - b[2]];
}
2
3
向量的叉乘
[
1, 1, 1,
a0,a1,a2,
b0,b1,b2
]
//利用三阶行列式求叉乘
function cross(a, b) {
return [
a[1] * b[2] - a[2] * b[1],
a[2] * b[0] - a[0] * b[2],
a[0] * b[1] - a[1] * b[0]
];
}
2
3
4
5
6
7
8
9
10
11
12
13
向量点乘
function dot(a, b) {
return a[0] * b[0] + a[1] * b[1] + a[2] * b[2];
}
2
3
矩阵乘法
function multiplyMatrices(a, b) {
let result = new Array(16);
for (let i = 0; i < 4; i++) {
for (let j = 0; j < 4; j++) {
result[i * 4 + j] = a[i * 4 + 0] * b[0 * 4 + j] +
a[i * 4 + 1] * b[1 * 4 + j] +
a[i * 4 + 2] * b[2 * 4 + j] +
a[i * 4 + 3] * b[3 * 4 + j];
}
}
return result;
}
2
3
4
5
6
7
8
9
10
11
12
下面是使用视图矩阵的代码demo地址 (opens new window)
参考文档
相机矩阵的推导 (opens new window)
WebGL三维相机 (opens new window)